 События
События Сигарообразная подводная робот-лодка готовится к своему первому приключению подо льдом Антарктики. Пункт назначения лодки – шельфовый ледник Росса (Ross Ice Shelf), который "выглядывает" из вод Западной Антарктики как плавающий язык. Специалисты планируют получить ранее не виданные изображения шельфового ледника, лед которого разъедает потеплевшая морская вода.
"Подводная лодка специально спроектирована для того, чтобы проникнуть в область, куда ране не ступала нога человека, и, что вероятнее всего, никогда и не ступит", - рассказывает Росс Пауэлл (Ross Powell), геолог из университета Северного Иллинойса. Пауэлл представил возможности подводной лодки-робота в 2010 году на осенней сессии американского геофизического союза.
Ледяной подводный мир
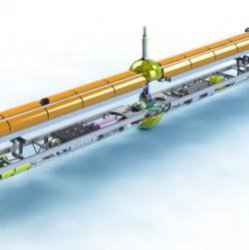
Ученые планируют использовать струю горячей воды для того, чтобы пробурить отверстие на 800 метров в глубину, что даст возможность роботу проникнуть вширь только на 76 см. Но этого вполне достаточно для 8,5 – метрового в длину робота в форме сигары, ширина же его составляет 56 см.
Как только подводная лодка попадает в воду, она выравнивается. Робот способен делать снимки, а также фиксировать физические, химические и биологические измерения льда, воды и донных отложений. Затем он передает полученную информацию на поверхность с помощью 3-х километрового кабеля.
Для каждого из "визитов" робота будут использованы различные скважины, каждый "визит" будет продолжаться до 10 дней, но ученые, тем не менее, надеются получить полную картину происходящего под ледником. "Наш эксперимент будет продолжаться в течение года, поскольку мы хотим получить полное понимание того, что происходит в океанских водах в связи с происходящими изменениями в окружающей среде", - пояснил Пауэлл.
Возвращение на поверхность
Робот может оставаться на глубинах бесконечное количество времени, потому что он питается от генераторов, находящихся на поверхности, а не работает за счет своей собственной батареи. Но все же время его пребывания ограничено учеными. Инженеры – робототехники морского института Сан-Франциско DOER разработали в случае катастрофы систему отказоустойчивости работы робота. Если робот внезапно потеряет управление, он рухнет гидравлически, в вертикальной форме, то есть так, чтобы специалисты смогли затем изъять его с помощью подключенного к нему кабеля.
Подготовка к спуску
Пауэлл и Рид Шерер (Reed Scherer), еще один геолог из Северного Иллинойса, планируют пробное погружение робота в озере Тахо (Tahoe), находящееся между Калифорнией и Невадой в марте 2011 года. Далее они планируют долгое путешествие в Антарктику для тестирования робота в районе станции Мак-Мурдо (McMurdo Station) в 2011 и 2012 годах. Затем они с помощью робота планируют исследовать озеро, находящееся ниже антарктического ледяного покрова в 2013 году. Наконец, подводная лодка изучит шельфовый ледник Роса в 2013 или 2014 году.
Исследователи планируют, что с помощью установленных технологий на борту робота можно будет в режиме реального времени передавать видео изображения, которые будут транслироваться на телевидении и в различных музеях, таким образом, у людей будет возможность следить за происходящими подводными исследованиями.













